
研究人员正在仿生软件滚动机器人运动领域前进
发布时间:2025-06-15 10:12
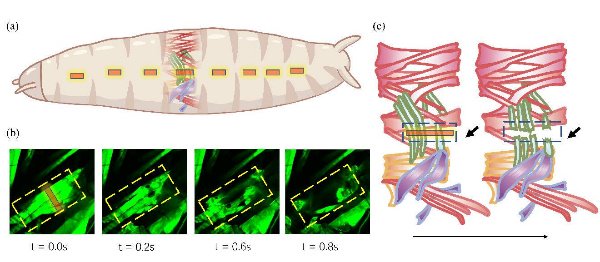 最近,郑郑和梁顿团队,科学学院的教授,哈尔滨技术学院的深圳校园学院,在模仿蝇幼虫机制的软机器人运动机制领域取得了新的发展。通过在运动运动过程中果蝇幼虫的肌肉活性的观察和机械模型,研究人员揭示了一个原理,即动物可以通过微妙的缩短和放松内部肌肉来产生滚动的时刻,并将这一原理应用于软的柔软的柔软开放式,开放到柔软的柔软,向柔软的道路开放,以柔软的方式开放了一个柔软的道路。结果发表在物理评论的信中,并命名为“编辑选择”。轮胎发明在人类文明中被称为阿米勒斯通,这基本在于将翻译转换为滚动扭矩。传统上,轮换应依靠脚和环境之间的外力或反作用力,例如在转弯时推动甲虫。但是,某些大自然的动物表现出完全不同的智慧。他们可以通过改变身体的内部结构来独立滚动。例如,如果飞行幼虫可以将其身体弯曲成C形状,并在遇到危险时继续滚动和逃脱,则尚未完全探索“内部力量驱动”的机制。为了应对这个问题,小组探讨了内部肌肉如何形成环形扭矩,从而驱动运动在运动运动过程中进行果蝇幼虫的肌肉活性的高时空和空间分辨率的运动。研究人员发现,在苍蝇幼虫的旋转过程中,肌肉群在身体的收缩和体内的舒张压运动以及身体的长轴上。当一份侧合同中的肌肉时,身体弯曲成C形;然后是相邻的肌肉继电器合同朝着弯曲方向朝着弯曲的方向进行,从而形成连续的 - 连续的片刻。该机制类似于“波浪输送”,可以产生环形驾驶时刻。幼虫肌肉消融实验。基于此,研究团队建立了一个多尺度的机械模型,包括肌肉动力学,静水骨变形和统一框架中的接触摩擦。该模型表明,幼虫中的氟化压力保持了人体壁的紧密度,从而使肌肉的能量有效地向后。当轴肌肉按顺序激活时,体壁的不对称应力分布会形成一刻。该模型证实,这种顺序膨胀和撤退可以在没有外部力的情况下产生环形力矩,并成功预测了平面,倒置表面甚至空气中的幼虫的行为。通过测量动态 - 润滑剂下速度和摩擦的新平衡在条件下,理论和实验观察高度一致。该团队的设计和机械模型高于生物学和机械模型,并设计了一个软机器人,仅由模拟的轴向肌肉组织组成,并通过在实时控制顺序中控制“肌肉”,成功地显示了自动移动机器人运动。该实现不仅确认了机械模型的准确性,而且还显示了工程化的可行性,该机制由内部结构变形驱动。原则上,这项研究系统地揭示了内部肌肉-in -law可以产生滚动时刻的机制,从而破坏了对希望的外部力量的惯性思维。同时,通过验证软件机器人,可以为新的可变形旋转机制设计一个新想法,并期望对复杂的海角酸酯(例如医疗机器人,现场发现和未来灾难)进行大量操纵。与论文有关:https://dii.org/10.1103/physrevlett.134.198401
最近,郑郑和梁顿团队,科学学院的教授,哈尔滨技术学院的深圳校园学院,在模仿蝇幼虫机制的软机器人运动机制领域取得了新的发展。通过在运动运动过程中果蝇幼虫的肌肉活性的观察和机械模型,研究人员揭示了一个原理,即动物可以通过微妙的缩短和放松内部肌肉来产生滚动的时刻,并将这一原理应用于软的柔软的柔软开放式,开放到柔软的柔软,向柔软的道路开放,以柔软的方式开放了一个柔软的道路。结果发表在物理评论的信中,并命名为“编辑选择”。轮胎发明在人类文明中被称为阿米勒斯通,这基本在于将翻译转换为滚动扭矩。传统上,轮换应依靠脚和环境之间的外力或反作用力,例如在转弯时推动甲虫。但是,某些大自然的动物表现出完全不同的智慧。他们可以通过改变身体的内部结构来独立滚动。例如,如果飞行幼虫可以将其身体弯曲成C形状,并在遇到危险时继续滚动和逃脱,则尚未完全探索“内部力量驱动”的机制。为了应对这个问题,小组探讨了内部肌肉如何形成环形扭矩,从而驱动运动在运动运动过程中进行果蝇幼虫的肌肉活性的高时空和空间分辨率的运动。研究人员发现,在苍蝇幼虫的旋转过程中,肌肉群在身体的收缩和体内的舒张压运动以及身体的长轴上。当一份侧合同中的肌肉时,身体弯曲成C形;然后是相邻的肌肉继电器合同朝着弯曲方向朝着弯曲的方向进行,从而形成连续的 - 连续的片刻。该机制类似于“波浪输送”,可以产生环形驾驶时刻。幼虫肌肉消融实验。基于此,研究团队建立了一个多尺度的机械模型,包括肌肉动力学,静水骨变形和统一框架中的接触摩擦。该模型表明,幼虫中的氟化压力保持了人体壁的紧密度,从而使肌肉的能量有效地向后。当轴肌肉按顺序激活时,体壁的不对称应力分布会形成一刻。该模型证实,这种顺序膨胀和撤退可以在没有外部力的情况下产生环形力矩,并成功预测了平面,倒置表面甚至空气中的幼虫的行为。通过测量动态 - 润滑剂下速度和摩擦的新平衡在条件下,理论和实验观察高度一致。该团队的设计和机械模型高于生物学和机械模型,并设计了一个软机器人,仅由模拟的轴向肌肉组织组成,并通过在实时控制顺序中控制“肌肉”,成功地显示了自动移动机器人运动。该实现不仅确认了机械模型的准确性,而且还显示了工程化的可行性,该机制由内部结构变形驱动。原则上,这项研究系统地揭示了内部肌肉-in -law可以产生滚动时刻的机制,从而破坏了对希望的外部力量的惯性思维。同时,通过验证软件机器人,可以为新的可变形旋转机制设计一个新想法,并期望对复杂的海角酸酯(例如医疗机器人,现场发现和未来灾难)进行大量操纵。与论文有关:https://dii.org/10.1103/physrevlett.134.198401